Quadcopter Parts List | What You Need to Build a DIY Quadcopter

For someone new to the multirotor hobby, putting together your first quadcopter parts list can be extremely daunting. Trying to figure out what to buy and what parts will work together is tough, especially for people who don’t come from a background in radio controlled planes or helicopters. Forums are packed with people who want to build a quadcopter but don’t know where to start. It can be frustrating trying to sort through the thousands of posts on forums and blogs and figure out what to do. We’ve heard from a lot of readers who are in similar positions and this post is designed to spell out exactly what you need for your first quadcopter build. While we will recommend a complete list of specific parts that we have used and tested for a complete quadcopter build, the main purpose of this post is to provide a general overview of the parts needed to build a quadcopter. Here’s what you’ll need:
- Frame
- Motor x4
- Electronic Speed Control (ESC) x4
- Flight Control Board
- Radio transmitter and receiver
- Propeller x4 (2 clockwise and 2 counter-clockwise)
- Battery & Charger
You will also need some miscellaneous things like zipties, double sided tape and/or velcro, a small amount of heavy gauge wire, battery strap, and some female to female servo leads or jumper wires. As far as tools go, you will want to have access to a soldering iron, small screwdrivers, hex wrenches, needle-nose pliers, and a hot glue gun. Now we’ll go over each part in detail and provide a specific recommendation.
Frame

Every quadcopter or other multirotor aircraft needs a frame to house all the other components. Things to consider here are weight, size, and materials. We recommend the DJI FlameWheel F450 or one of the many clones. These are great quadcopter frames. Check out our review of the FlameWheel F450 here. They’re strong, light, and have a sensible configuration including a built-in power distribution board (PDB) that allows for a clean and easy build. There are also a ton of spare parts and accessories available from many different websites. In our online store, we offer the RCTimer SM450 Quadcopter Frame, which is an F450 clone and includes the same built-in PDB and durable construction as the original. Parts and accessories are 100% compatible and interchangeable.
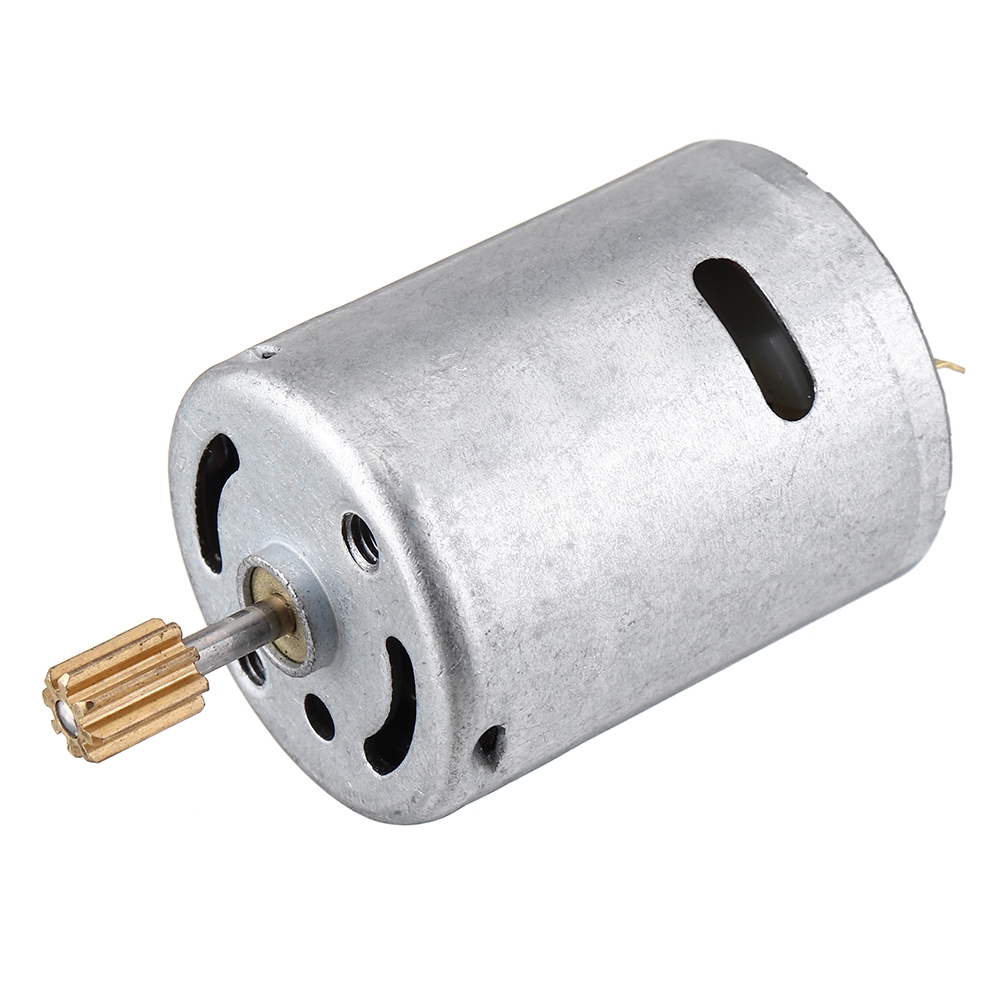
Motors

The motors have an obvious purpose: to spin the propellers. There are tons of motors on the market suitable for quadcopters, and usually you don’t want to get the absolute cheapest motors available, but you also don’t want to break the bank when some reasonably priced motors will suffice. Motors are rated by kilovolts, and the higher the kV rating, the faster the motor spins at a constant voltage. When purchasing motors, most websites will indicate how many amps the ESC you pair it with should be and the size of propeller you should use. We have found that a 1000kV motor is a good size to start with.
Electronic Speed Controls

The electronic speed control, or ESC, is what tells the motors how fast to spin at any given time. You need four ESCs for a quadcopter, one connected to each motor. The ESCs are then connected directly to the battery through either a wiring harness or power distribution board. Many ESCs come with a built in battery eliminator circuit (BEC), which allows you to power things like your flight control board and radio receiver without connecting them directly to the battery. Because the motors on a quadcopter must all spin at precise speeds to achieve accurate flight, the ESC is very important. These days if you are building a quadcopter or other multirotor, it is pretty much standard to use ESCs that have the SimonK firmware on them. This firmware changes the refresh rate of the ESC so the motors get many more instructions per second from the ESC, thus have greater control over the quadcopter’s behavior. Many companies sell ESCs that have the SimonK firmware already installed. We carry theRCTimer 30A SimonK ESC, which is a good option for a first quadcopter build and pairs well with the RCTimer motors mentioned previously.
Flight Controller

The flight control board is the ‘brain’ of the quadcopter. It houses the sensors such as gyroscopes and accelerometers that determine how fast each of the quadcopter’s motors spin. Flight control boards range from simple to highly complex. A great flight control board for first time quadcopter builders is the HobbyKing KK2.0. It is affordable, easy to set up, and has strong functionality. It can handle just about any type of multirotor aircraft so if you later want to upgrade to a hexacopter or experiment with a tricopter, you won’t need to purchase another board.
Radio Transmitter and Receiver

The radio transmitter and receiver allow you to control the quadcopter. There are many suitable models available, but you will need at least four channels for a basic quadcopter with the KK2.0 control board. We recommend using a radio with 8 channels, so there is more flexibility for later projects that may require more channels. The Turnigy 9x is a great choice for a first radio. It’s inexpensive yet still has some advanced functionality. There is also a large community of 9x users out there, so troubleshooting is easier. Chances are any problem you have has been experienced and solved before, or someone on a forum like rcgroups will be able to help you out.
Propellers

A quadcopter has four propellers, two “normal” propellers that spin counter-clockwise, and two “pusher” propellers that spin clockwise. The pusher propellers will usually be labeled with an ‘R’ after the size. For the quadcopter configuration in this post, we’re using 9×4.7 props. This is a good size for the motors and ESCs we’re using.
Battery

Quadcopters typically use LiPo batteries which come in a variety of sizes and configurations. We typically use 3S1P batteries, which indicates 3 cells in parallel. Each cell is 3.7 volts, so this battery is rated at 11.1 volts. LiPo batteries also have a C rating and a power rating in mAh (which stands for milliamps per hour). The C rating describes the rate at which power can be drawn from the battery, and the power rating describes how much power the battery can supply. Larger batteries weigh more so there is always a tradeoff between flight duration and total weight. A general rule of thumb is that doubling the battery power will get you 50% more flight time, assuming your quadcopter can lift the additional weight. For this quadcopter, we suggest the Turnigy nano-tech 3000mAh 3S LiPo.
Battery Charger

Charging LiPos is a complex process, because there are usually multiple cells within the battery that must be charged and discharged at the same rate. Therefore you must have a balance charger. There are many chargers on the market that will do the job, but be careful of cheap or off-brand chargers as many of them have faulty components and can cause explosions or fires. In general you should absolutely never leave LiPo batteries charging unattended. Many people charge batteries outside on a cement area or in a fireproof LiPo bag (although the effectiveness of these is up for debate). We recommend the IMAX B6 AC Balance Charger. It is affordable but reliable. Be wary of knock-offs.
Summary
Those are the major components that you need to build a quadcopter. There are hundreds of possible configurations, which can make the process of choosing parts confusing for someone new to the hobby. Hopefully this list has provided some clarity.
Add Comment